Modelo IS-LM Dinâmico - Parte 2/2
Introdução
No post anterior, formulamos uma versão dinâmica do conhecido modelo IS-LM. Daremos continuidade avaliando outras informações do modelo. Avaliaremos aqui algumas trajetórias e o digrama de fases do modelo.
Resumidamente, temos que a dinâmica do modelo é dada por duas EDOs subsequentes: \[\dot{y}=\alpha.\left[A+a_1.y(t)-h.r(t) \right]\] \[\dot{r}=\beta.\left[-m_0+k.y(t)-u.r(t)\right] \] Em termos de script, o sistema pode ser desenhado através da seguinte função:
rm(list=ls())
IS_LM <- function(t, state, parameters) {
with(as.list(c(state, parameters)), {
y <- state[1]
r <- state[2]
y_dot <- alpha*(A +a1*y -h*r)
r_dot <- beta*(-m0 + k*y -u*r)
return(list(c(y_dot,r_dot)))
})
}Diferentemente do post anterior, modificamos a função em dois pontos. Deixamos apenas o sistema de derivadas que retroalimenta por integração as variáveis estado e passamos a declarar que y e r são a primeira e a segunda variaveis estado inputadas.
Na sequência, definimos como uma lista os parâmetros que serão utilizados. A lista possui a vantagem de definirmos os valores atrelados aos nomes. Como ao fim o modelo tem parâmetros agregados, utilizamos dessa primeira lista para obter os parâmetros agregados. Nesse sentido utilizamos a função attach para poder chamar na manipulação dos parâmetros agregados o nome direto da lista de parâmetros.
Parametros <- list(alpha = 0.3,
beta = 0.5,
k = 0.25,
h = 1.3,
k = 0.6,
u = 0.7,
j = 0.3,
b = 0.7,
g = 0.05,
q = 0.1,
Tax = 0.25,
M = 30,
P = 1,
X = 6,
C_bar = 6,
I_bar = 25,
L_bar = 40,
G_bar = 15,
Q_bar = 9)
attach(Parametros)
Parametros_Agregados <- list(A = C_bar+I_bar+X+G_bar+Q_bar,
a1 = b*(1-Tax)+j+g-q,
m0 = M/P - L_bar,
alpha = alpha,
beta = beta,
k = k,
h = h,
k = k,
u = u)Agora, o próximo passo será através do uso do pacote phaseR. Nele, geramos o diagrama de fases através da função flowField, geramos as isóclinas (duas retas onde respectivamente \(dy/dt=0\) e \(dr/dt=0\)) através da função nullclines. Por fim, usamos a função trajectory para resolver a trajetória temporal a partir de valores iniciais do par \((y_0,r_0)\). Para solucionar algumas trajetórias, inputamos na forma de matriz os valores iniciais em 2 colunas.
library(phaseR)
IS_LM.flowField <- flowField(IS_LM,
xlim = c(0,250),
ylim = c(0,250),
parameters = Parametros_Agregados,
points = 20,
add = FALSE,
main = "Diagrama de Fase - Modelo IS-LM",
ylab = "Valor de r", xlab = "Valor de Y")
IS_LM.nullclines <- nullclines(IS_LM,
xlim = c(0,250),
ylim = c(0,250),
parameters = Parametros_Agregados,
points = 500,
col = c("blue","red"),
lwd = 2, lty = 2,
add.legend = FALSE)
state <- matrix(c(10, 50, 80, 2, 50, 100), ncol = 2, nrow = 3, byrow = TRUE)
IS_LM.trajectory <- trajectory(IS_LM,
y0 = state,
tlim = c(0,200),
parameters = Parametros_Agregados,
col = "black")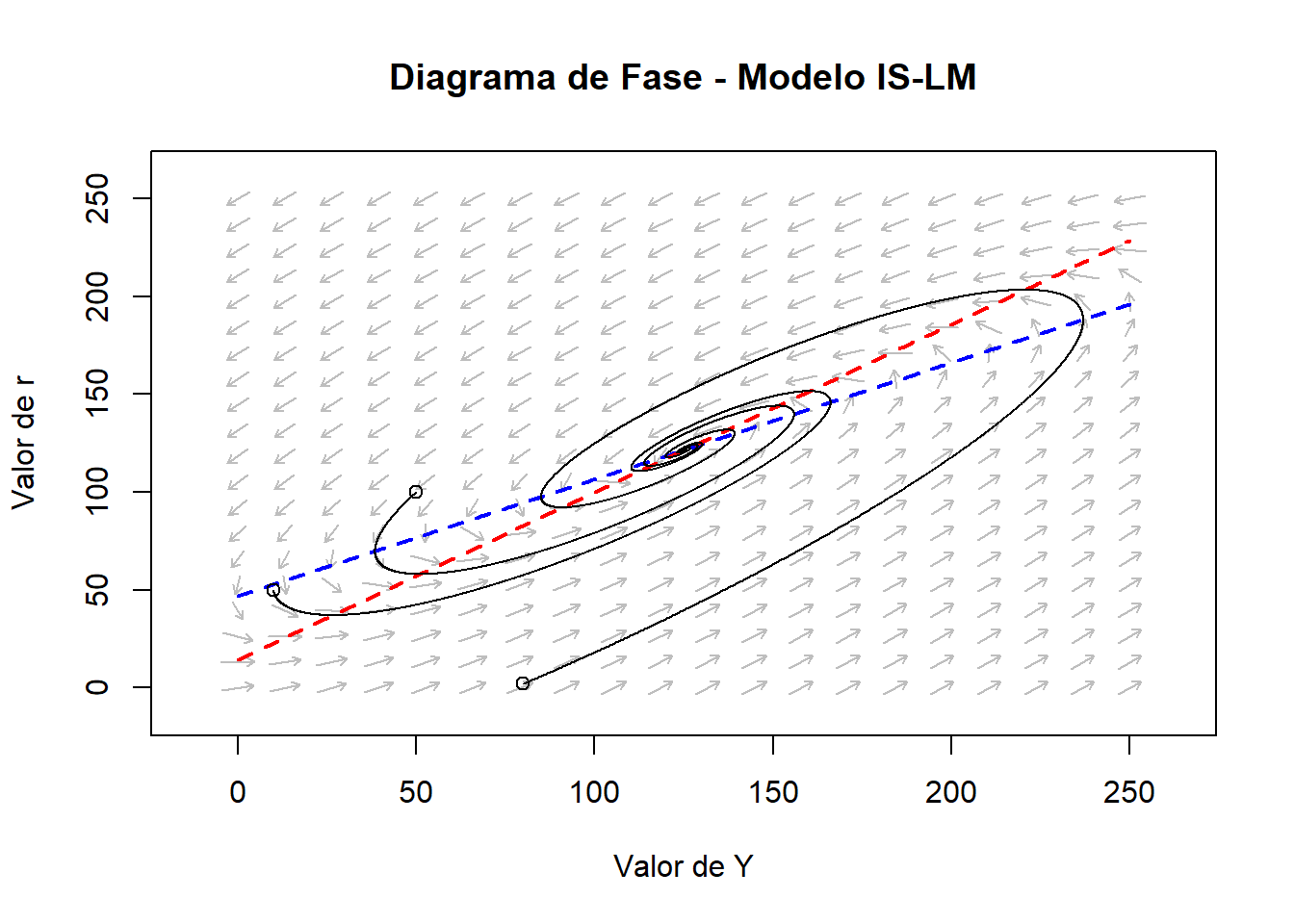
Dessa forma, concluímos esse post com o plot acima. Podemos verificar que independente do ponto de início, a trajetória do par ordenado converge para o equilíbrio. A análise de estabilidade do ponto de equilíbrio já fora verificado no post anterior. Um ponto que cabe destaque é que o ponto onde as duas isóclinas se encontram é justamente onde surge o equilíbrio, uma vez que é justamente lá que as duas derivadas são iguais a zero.
Júlio Fernando Costa Santos
Professor of Economics
My research interests include Finance, Macroeconomics and Econometric techniques.